| home portfolio contact | ||
 |
||
 fig.1 - Bovenaanzicht van de EPO2 robot. fig.1 - Bovenaanzicht van de EPO2 robot.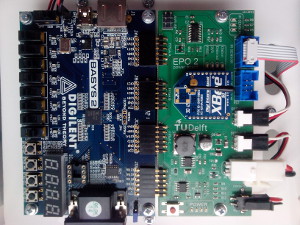 fig.2 - Closeup van het moederbord. fig.2 - Closeup van het moederbord. |
De Technische Universiteit Delft vroeg ons om een lijnvolgende robot te ontwikkelen voor het 2e jaars electrotechniek practicum waarbij studenten de stuurlogica moeten ontwerpen met VHDL. We hebben tijdens de ontwikkeling van dit systeem veel aandacht besteed aan het ontwerpen van een envoudig te assembleren product dat eveneens bestand is tegen verkeerd gebruik. De infrarood sensoruitlezing en de motorbesturing worden geregeld door een FPGA. Ons moederbord regelt de spanningsniveaus en de interfacing voor het hele systeem dat bestaat uit een Digilent Basys2 bord, een XBee wireless module, onze IR sensor print en onze prototyping print. Ook implementeren we batterijbewaking met auto-off functie en weergave van de batterijspanning. Het systeem is energiezuinig en fool-proof. Een verkeerd aangesloten batterij (te hoge spanning of verkeerde polarisatie) zal het systeem niet beschadigen. Zoals gebruikelijk bij Bekking Electronics Design, leveren we alle producten netjes verpakt en voorzien van uitgebreide documentatie. Ook schema's en fraaie 3D weergaven zullen niet ontbreken.  fig.3 - Tevreden klant maakt foto van het werk. fig.3 - Tevreden klant maakt foto van het werk.
|
|
|
|
||